
After decades of research and testing, self-driving vehicles are common in some US cities and China. What intelligence lies behind these vehicles?
In this course, designed and prepared by professors at the Department of Electronics, Information, and Bioengineering at the Polytechnic University of Milan, we will attempt to answer these questions technically and scientifically. We will address all the main tasks that an autonomous vehicle must perform.
We'll understand which tools (sensors) are used to perceive the world around the vehicle. Specifically, we'll learn how to use LiDAR (laser sensors), radar, and cameras.
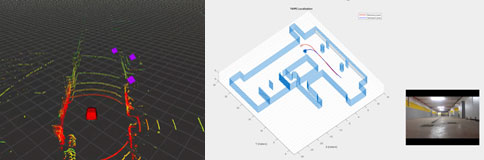
To navigate, a self-driving car must know where it is. In this section, we'll study and apply localization algorithms.
How can we avoid accidents and still reach the right destination? This is the task of navigation and planning algorithms, which plot the most appropriate route.
It's not enough to know where we are, where we want to go, and where obstacles are. A key element of autonomous driving is ensuring that the vehicle follows our commands. This is the task of motion control algorithms, which we will study, develop, and test in this final section of the course.

