Corso estivo su veicoli autonomi per studenti delle superiori
Intelligent and autonomous vehicles
Ci stanno provando Tesla, Apple, Google e molti altri. I veicoli a guida autonoma saranno il futuro? Quale intelligenza sta dietro a questi veicoli?
Nel corso, pensato e preparato da docenti del Politecnico del Dipartimento di Elettronica, Informazione e Bioingegneria, cercheremo di rispondere in modo tecnico e scientifico ad alcune di queste domande. Verranno affrontati i principali compiti che un veicolo a guida autonoma deve risolvere.
Percezione
Impareremo quali strumenti (sensori) vengono usati per percepire il mondo intorno al veicolo. In particolare, impareremo ad usare i LiDAR (sensori laser), i Radar e le telecamere.
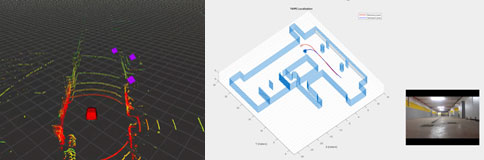
Localizzazione
Per poter andare da qualche parte, l’auto a guida autonoma deve sapere dove si trova. In questo capitolo studieremo e metteremo in pratica gli algoritmi di localizzazione.
Navigazione
Come è possibile evitare incidenti e allo stesso tempo raggiungere la destinazione? E’ compito degli algoritmi di navigazione e pianificazione che tracciano la retta via.
Controllo
Non è sufficiente sapere dove siamo, dove vogliamo andare e dove sono gli ostacoli. Un tassello fondamentale del puzzle della guida autonoma è far si che il veicolo segua i nostri ordini. È il compito degli algoritmi di controllo del moto che studieremo, svilupperemo e testeremo in questo capitolo.
Guidati dai ricercatori del Politecnico di Milano, i ragazzi potranno sperimentare come le scelte progettuali discusse influenzano il comportamento di un veicolo autonomo prototipale. Gli studenti sperimenteranno con un agile veicolo per le consegne autonome: Yape.

Requisiti tecnici
Per prendere parte al corso dovrai arrivare munito di un tuo pc portatile. In nessun caso potrai utilizzare un tablet: i software utilizzati non verrebbero supportati adeguatamente.
Ti servirà uno tra questi sistemi operativi:
- Windows 10 (1909 o più recente) oppure Windows 11
- MacOS 10.10 (o successivi)
con il pacchetto Office installato.
Il PC dovrà avere le seguenti caratteristiche hardware:
- Processore: Intel o AMD x86-64
- Disco con 5-8 GB di spazio libero
- Almeno 4 GB di RAM
Prima dell’inizio del corso dovrai installare Matlab (https://it.mathworks.com/products/matlab.html), ma per fare questo hai bisogno di una licenza che ti forniremo gratuitamente più avanti. Riceverai quindi ulteriori e specifiche istruzioni via email.
Se dovessi avere dei dubbi puoi scriverci all’indirizzo assistenzainformatica.techcamp@gmail.com o nel gruppo Telegram.
Video presentazione
Dettagli del corso
![]() Date inizio: 10.06.2024
Date inizio: 10.06.2024
17.06.2024
![]() Durata: 1 settimana
Durata: 1 settimana
![]() Orario lezioni: 09:30 AM - 04:30 PM
Orario lezioni: 09:30 AM - 04:30 PM
![]() Prezzo: 800,00 €
Prezzo: 800,00 €
![]() Certificazione: Attestato di frequenza
Certificazione: Attestato di frequenza
![]() Lingua: Inglese
Lingua: Inglese
![]() Docenti: Prof. Matteo Corno
Docenti: Prof. Matteo Corno
![]() Siti di riferimento: Pagina Prof. Corno
Siti di riferimento: Pagina Prof. Corno
![]() Giornata tipo: Guarda la giornata tipo
Giornata tipo: Guarda la giornata tipo